2강 Markov Decision Processes
RL에서 가장 기본이 되는 이론인 MDP에 대해서 공부하고 정리
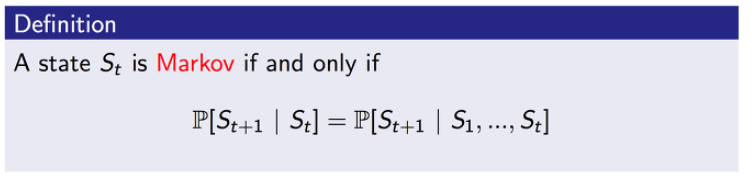
Markov state
- 현재 상태의 조건에서 다음 상태가 발생할 확률과 과거의 모든 상태의 조건에서 다음 상태가 발생할 확률이 같을 때, 이 때의 St는 Markov property라고 한다.
- 현재 주어진 상태는 과거의 모든 history 정보를 포함하고 있기 때문에 현재의 정보가 중요하며, 과거의 정보들은 의미가 없어진다.
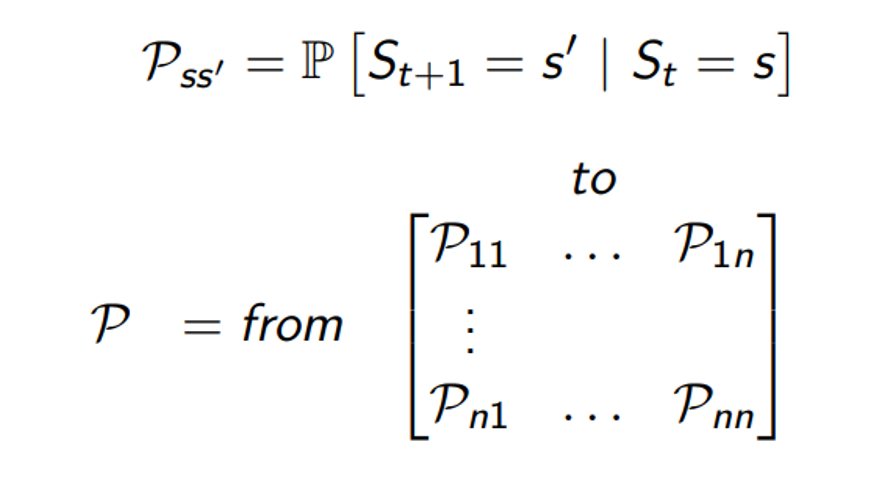
Markov Property
•St가 s 인 현재 상태일 때를 조건으로 하는 S(s+1)이 S′ 상태가 될 확률을 Pss′로 표현
•발생하는 경우의 수를 나열하여 매트릭스의 형태로 표현
•P11은 현재 상태가 1이라고 할 때 다음의 상태도 1인 경우의 확률
Markov Process
- 과거에 무엇을 했는지는 중요하지 않고 기억 하지 않음
- 현재 상태에서 하고 싶은 것 만을 랜덤하게 선택
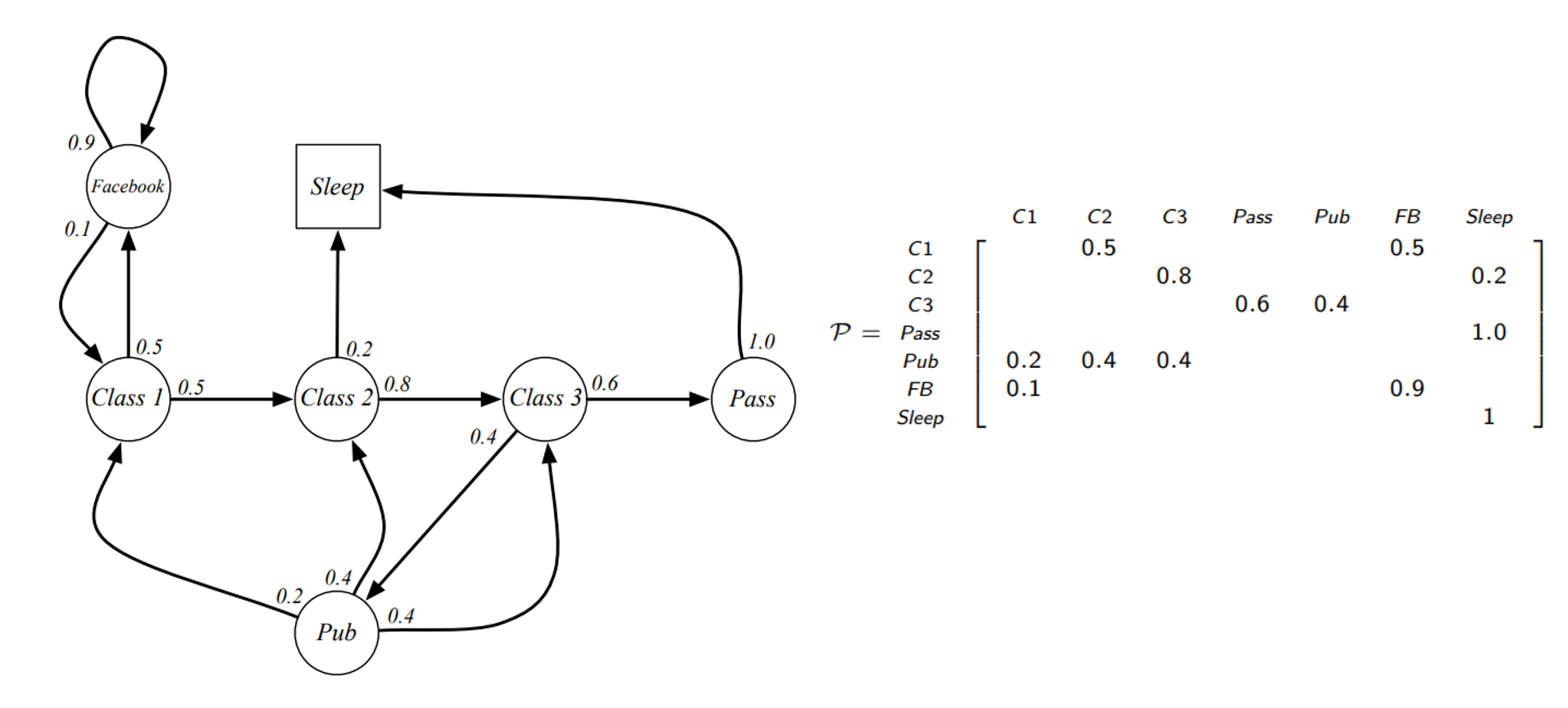
Example : Student Markov Chain
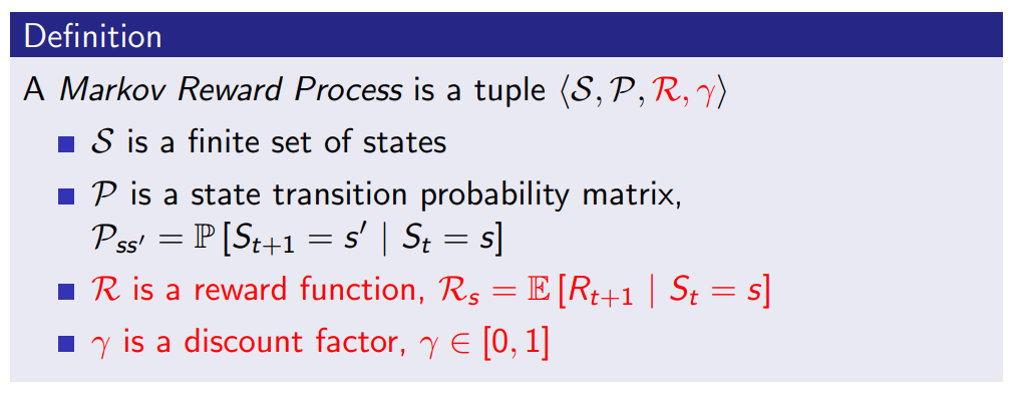
Markov Reward Process
-
Markov process에 values라는 개념을 추가
-
가치를 판단하기 위해 reward와 discoun factor가 있음
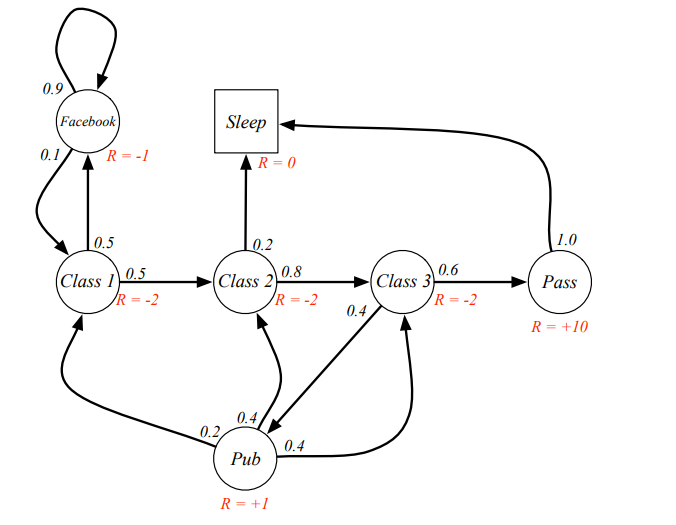
Example : Student MRP
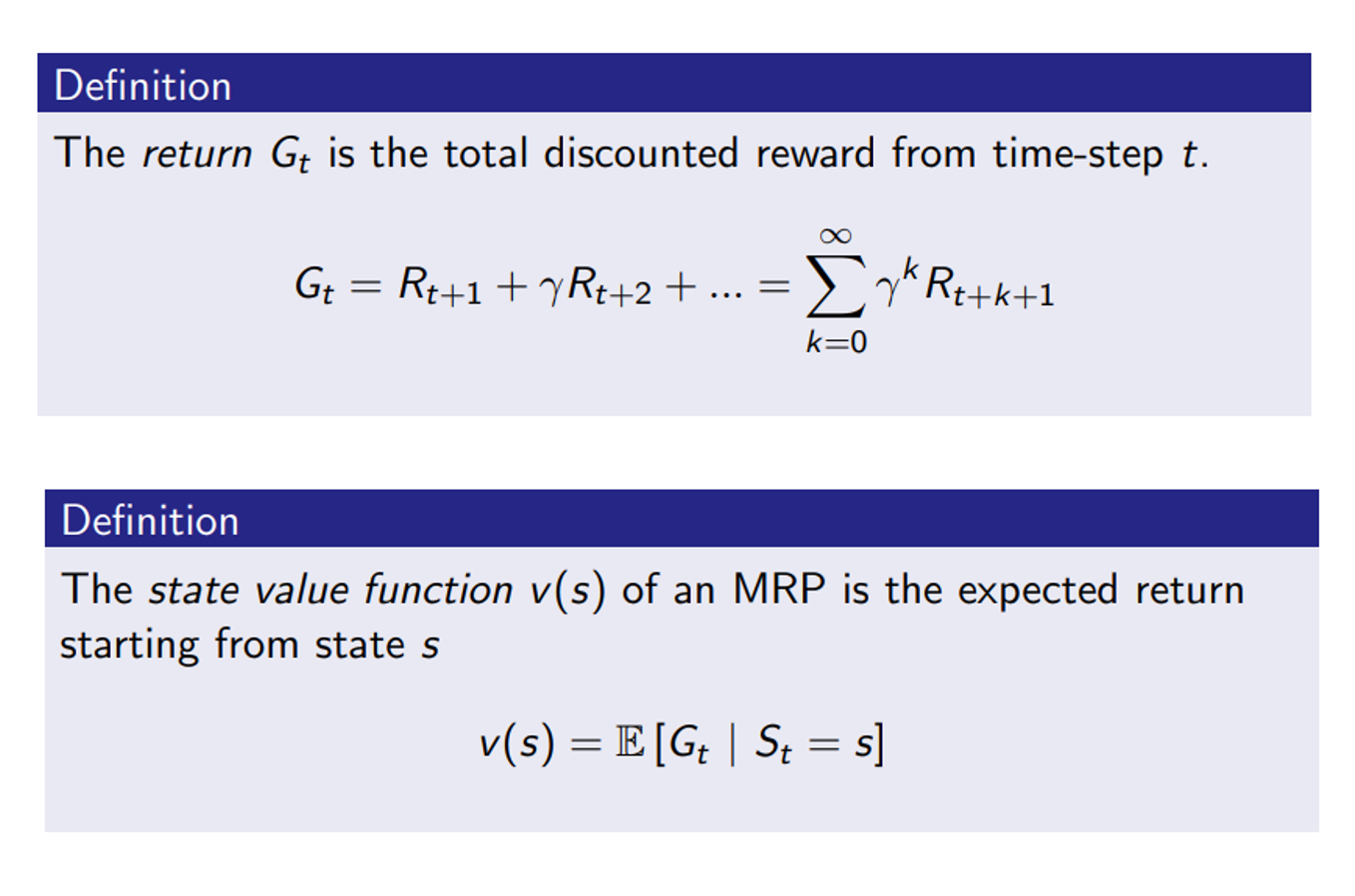
Return / value function
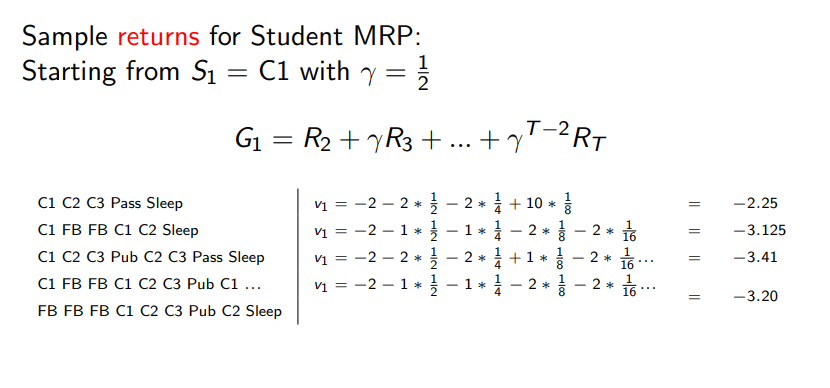
Example : Student MRP Returns
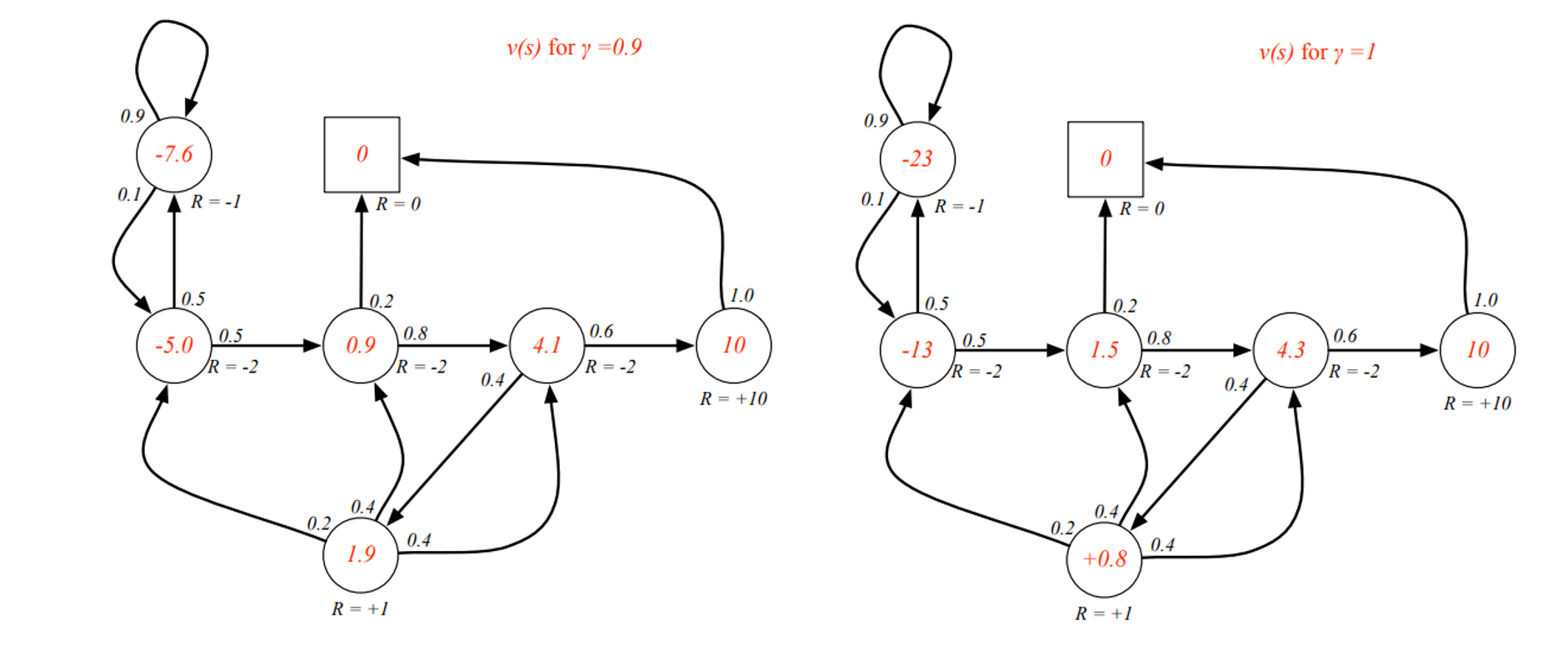
Example : State-Value Function Student MRP
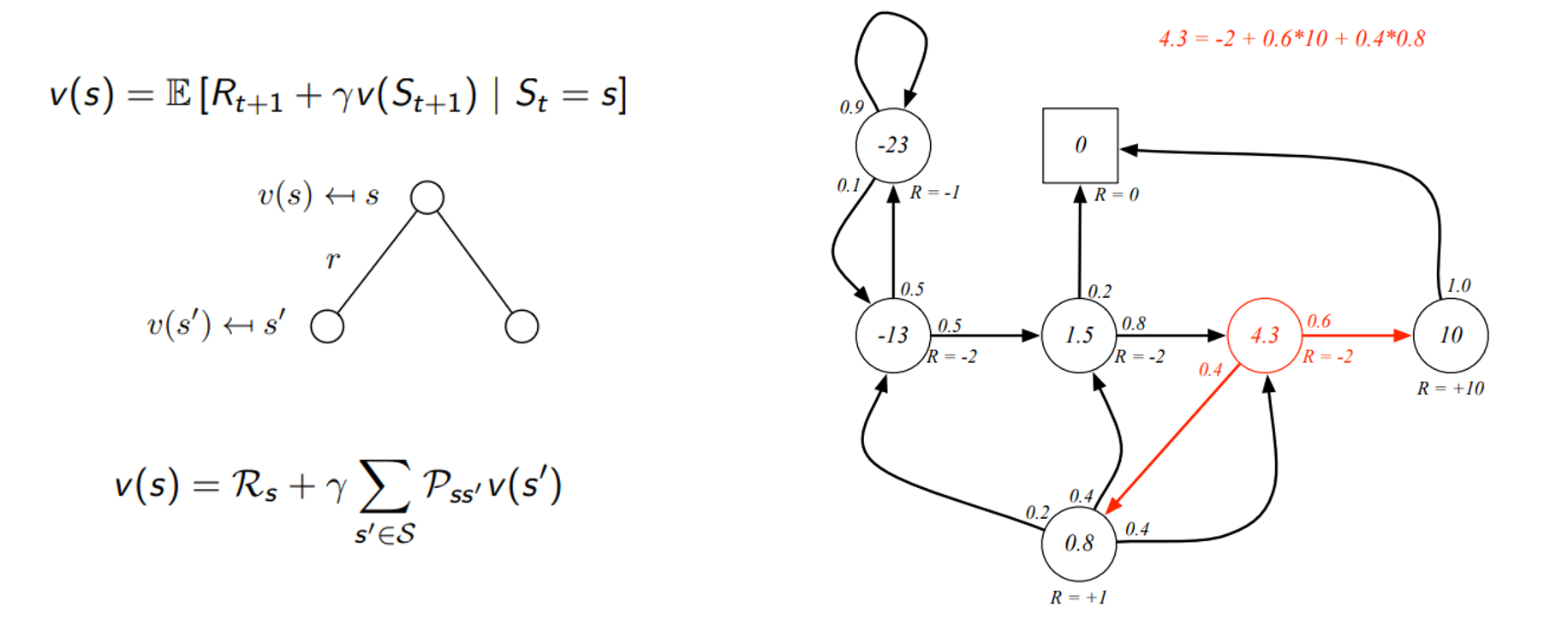
Bellman Equation for MRPs
- value function을 두가지 파트로 분리 할 수 있음
- Bellman equation을 통해서 현재 시점의 value는 현재의 보상과 다음 시점의 value로 표현
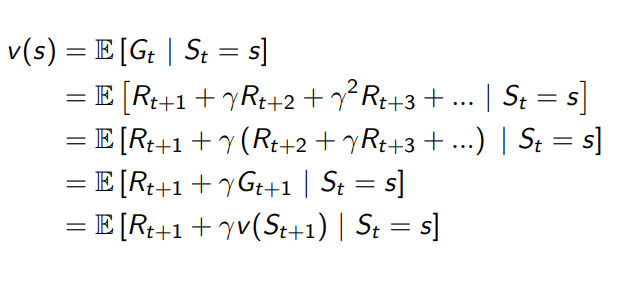
- 미래의 가치가 현재의 시점의 가치를 결정
- 밑에 부분에서의 v(s’) 두개를 합하여 할인하면 현재 시점 s의 가치를 구성하는 형태
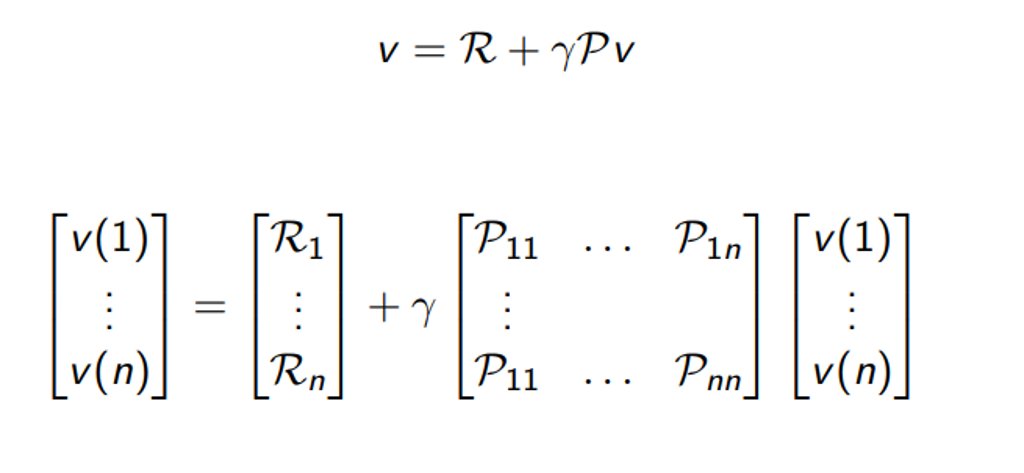
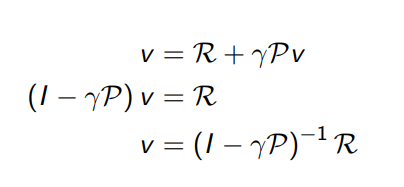
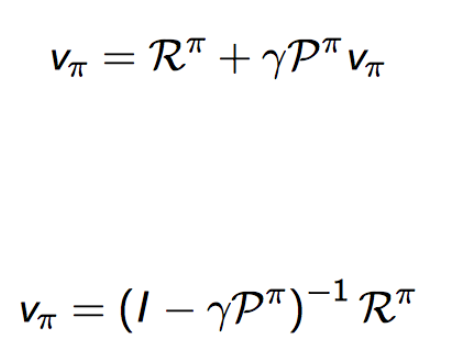
Bellman Equation in Matrix Form
- 이를 모두 표현하는 matrix형태로 표현
Solving the Bellman Equation
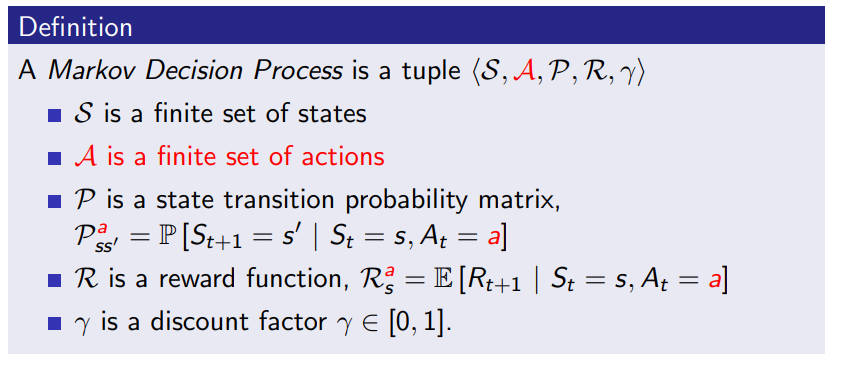
Markov Decision Process
- MRP에 의사결정에 대한 Action을 추가
Policy
- 현재 state에 대하여 어떤 action을 할 확률
- 과거의 정보는 고려하지 않고 action
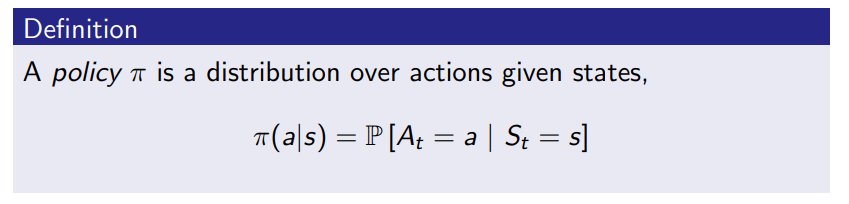
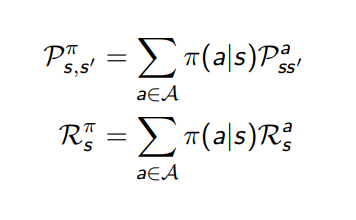
- policy의 개념을 Markov process에 적용하여 표현하면 P(s,s′)π
- Reward에 적용하면 Rsπ
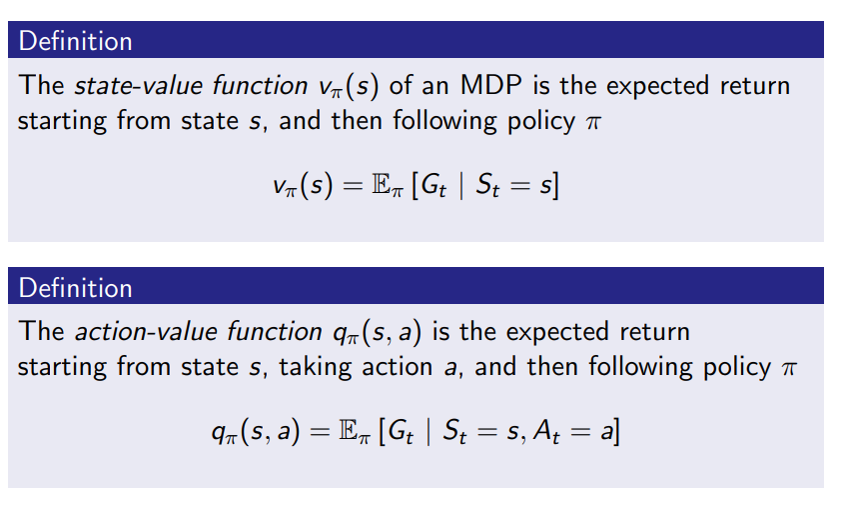
Value Function
- state s에서 policy를 따르는 v 가 되며 이것은 s에서 policy를 따르는 보상들의 모든 합
- state에 대한 value뿐만 아니라 agent가 하는 action에 대해서도 value를 측정 해야함
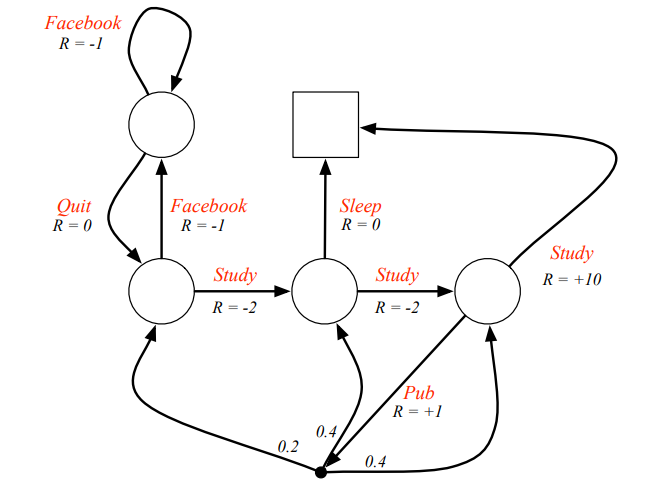
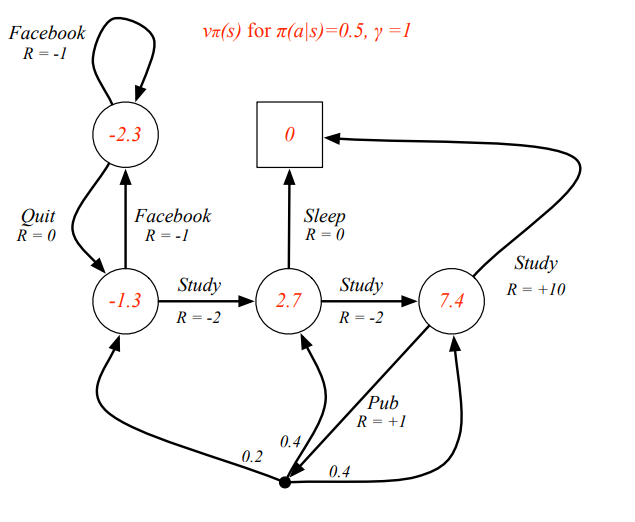
Example: State-Value Function for Student MDP
Bellman Expectation Equation
- Bellman equation을 사용해서 분리하면 다음과 같이 됨
- q도 동일하게 표현하면 s에서 어떤 a를 했을 때의 가치를 나타냄
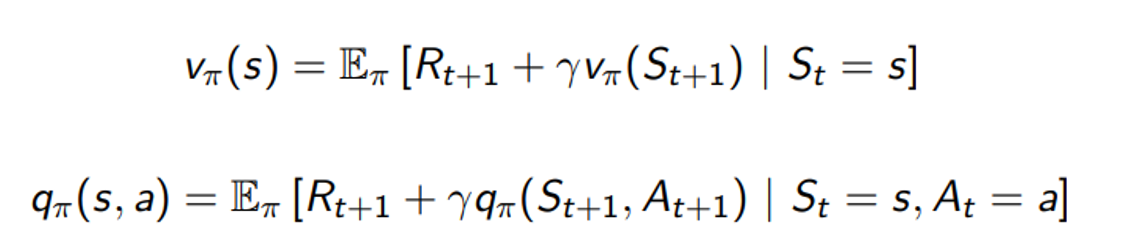
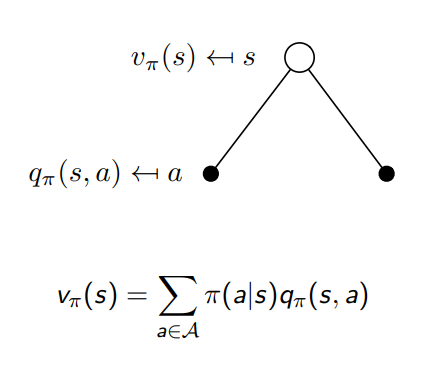
Bellman Expectation Equation for Vπ
- 현재 state s에서 policy를 따르는 v는 두가지 action 중에 하나에 대한 action a을 했을 때와 나머지 action에 대한 q를 합치면 v를 구성하게 됨
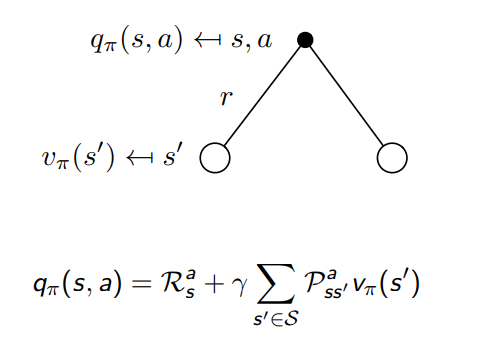
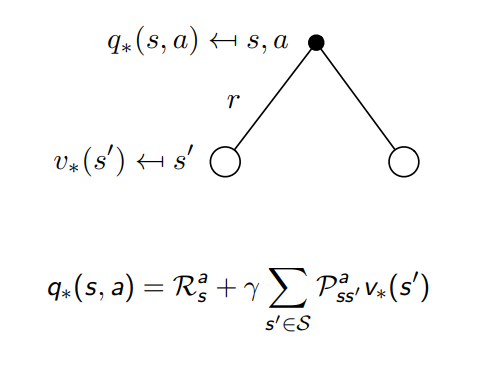
Bellman Expectation Equation for Qπ
-
또 현재 state s 에서 action a를 할 때 policy를 따르는 q 는 그로 인해서 받게 되는 reward r과 다음 state s’ 에서의 policy를 따르는 v 값에 따라 결정됨 e
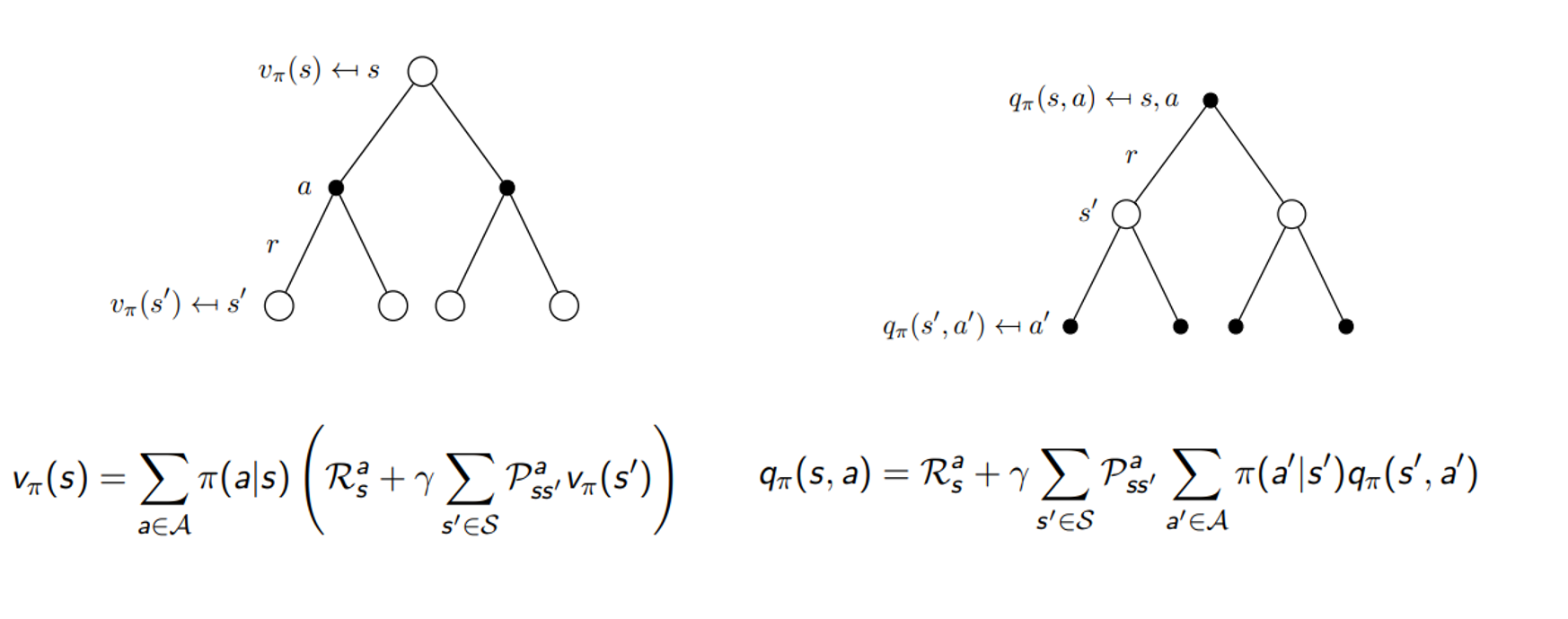
Bellman Expectation Equation for Vπ, Qπ
- v 는 처음에는 q로 구성이 되었었지만 현재는 결국 다음 state의 v로만 표현이 되며, q도 마찬가지로 처음에는 v로 구성이 되었었지만 현재는 다음 state의 q로 표현이 된다는 것을 발견할 수 있음
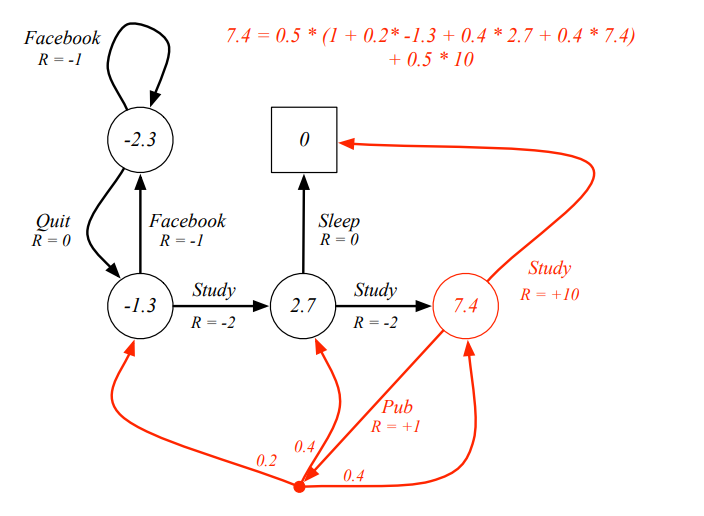
Example: Bellman Expectation Equation in Student MDP
Bellman Expectation Equation (Matrix Form)
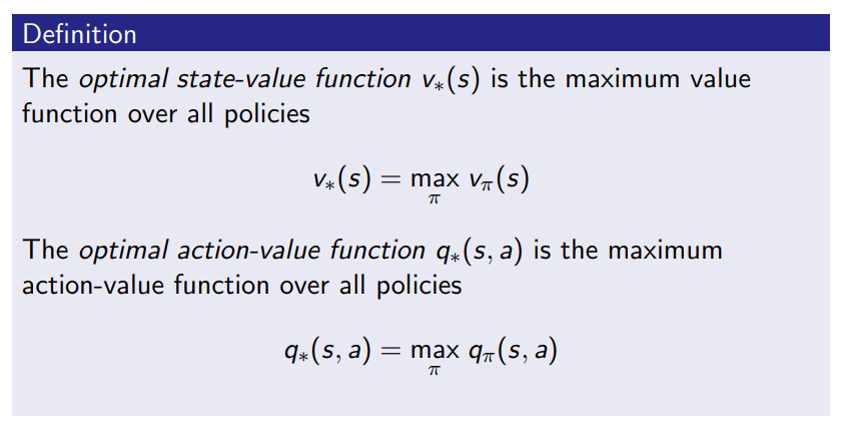
Optimal value Function
-
state-value function이 갖는 값이 최대값이 되도록 함
-
마찬가지로 action-value function이 갖는 값이 최대값이 되도록
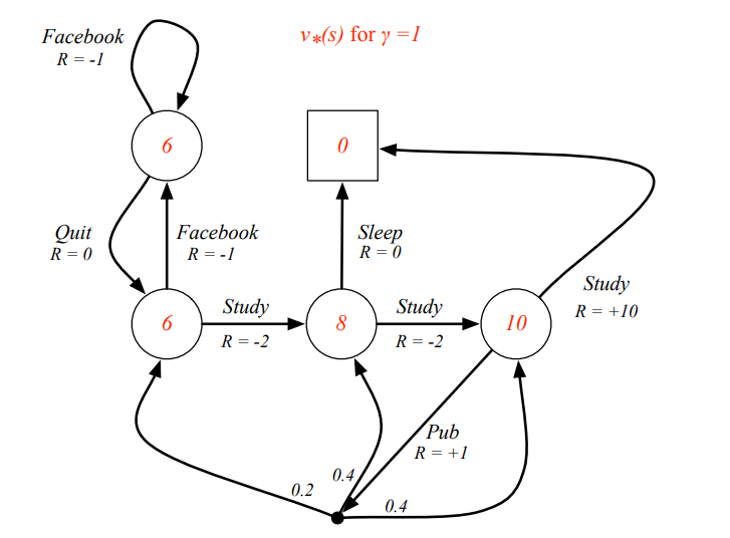
Example: Optimal Value Function for Student MDP
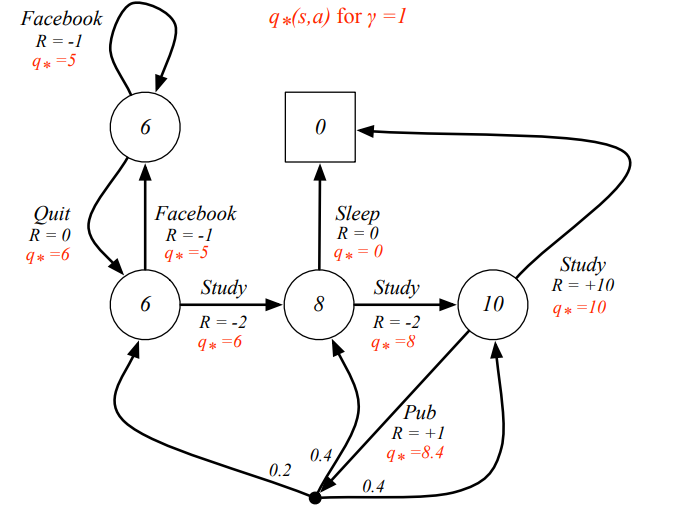
Example: Optimal Action-Value Function for Student MDP
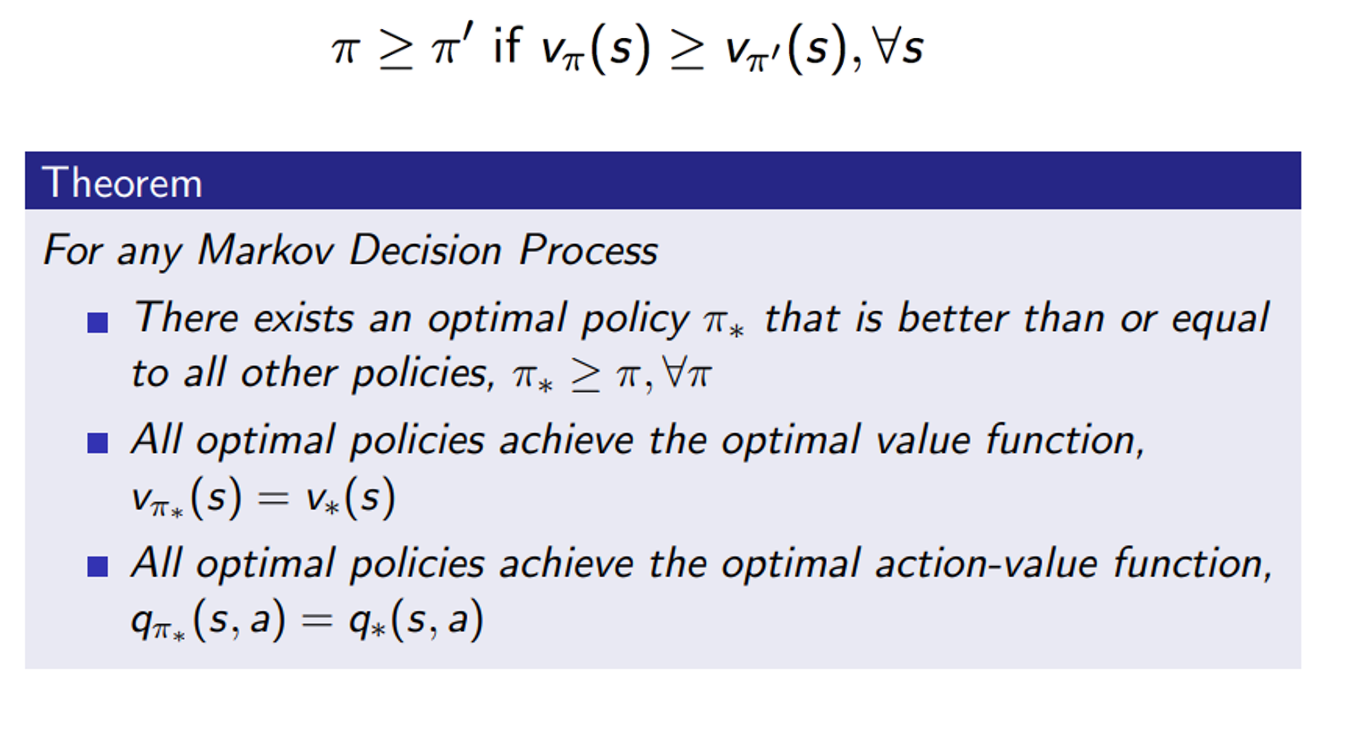
Optimal Policy
- 모든 state에 대하여, 만약 policy를 따르는 v(s)가 다른 policy’를 따르는 v(s)보다 크거나 같다면 policy가 policy’ 보다도 더 좋거나 같은 결과를 내는 정책
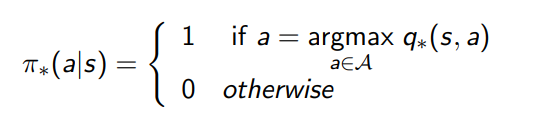
Finding an Optimal Policy
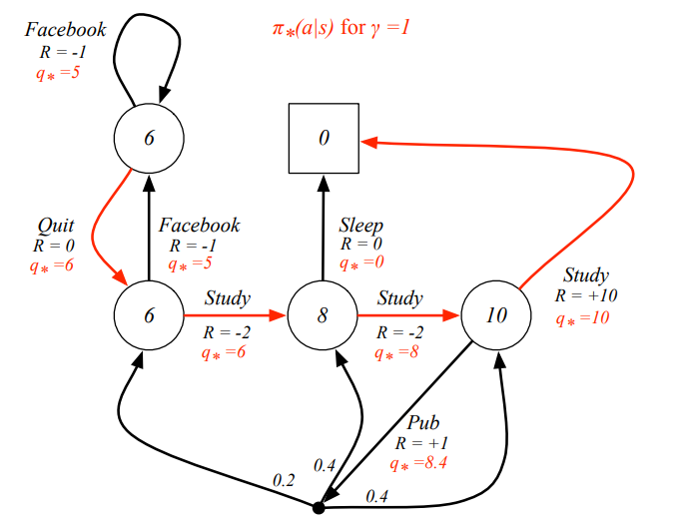
Example: Optimal Policy for Student MDP
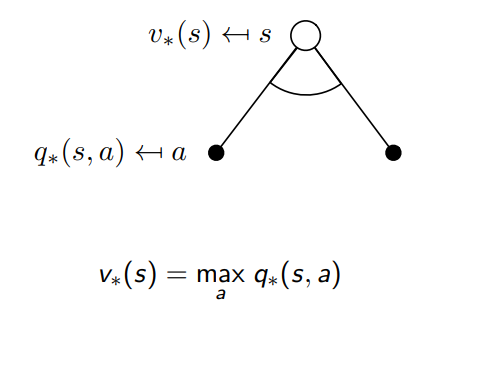
Bellman Optimality Equation
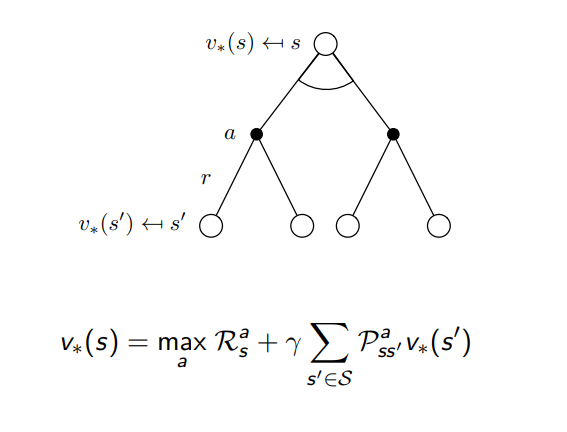
Bellman Optimality Equation for v∗
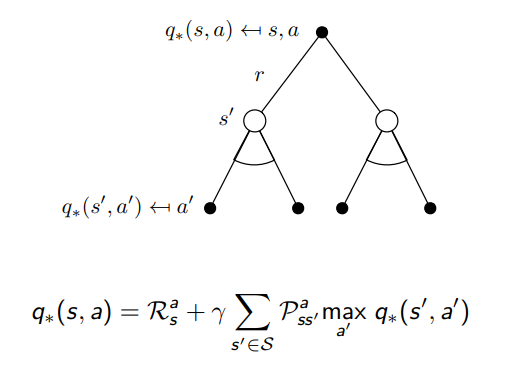
Bellman Optimality Equation for Q∗
Bellman Optimality Equation for v∗
Bellman Optimality Equation for Q∗
Example: Bellman Optimality Equation in Student MDP
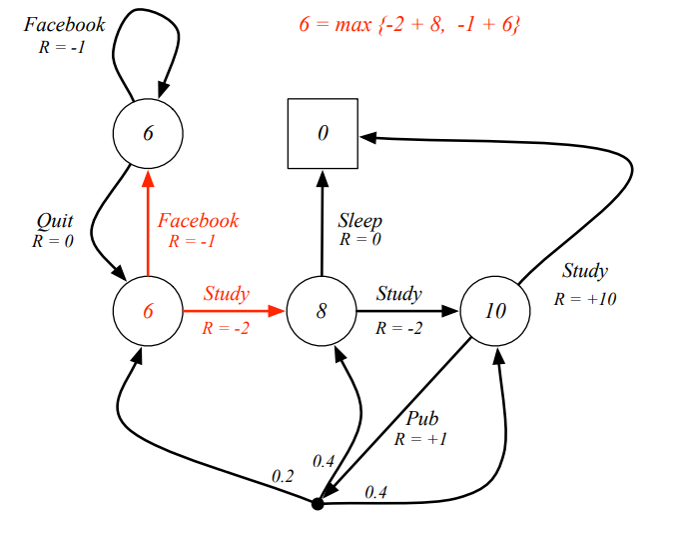
Solving the Bellman Optimality Equation
Leave a comment